- Home
- Products
- Articles
- 4 Axis Robot Arm
- A Stepper Motor Driven Ferris Wheel (Version 3 Compiler required)
- An Update on Keith Cameron's Lift
- Automatic Tram Layout
- Bug in Increment Word Instruction
- Compiler Version Releases
- Industrial Arc Welding Robot
- MotorVating the Speed Play Robot
- Reproducing the Electronic Set Models
- Sensor Expansion Port Pinout Diagram
- Sheet 1 - Hardware from NZ 240 volt wall socket to...
- Sheet 3 Meccano Car model controlled by the MotorVator and Director.
- Sheet 2 - Hardware from Motor(s) to MotorVator®.
- User Input Options
- Version 3 Manual Released
- 16/32 Bit Maths Routines
- Build Your Own Photo Sensor
- Controlling Stepper Motors
- Magnetic reed switch as a non contact sensor
- MeccCompiler III Tutorial
- More Inputs and/or Motors: Port Replication
- More Inputs: the Sensor Expansion Port
- Square Root Function
- Tutorial: Rev Counter
- Use of the opto switch or opto interrupter as a ro...
- FAQ
An Update on Keith Cameron's Lift
The Model is based on a design by Keith Cameron published in Constructor quartely No 7 march 1990 and is a simple example of the application of the Motorvator. This really complements my tram model as in the latter case this was an example of how the Motorvator could considerably simplify the automatic operation of a model without user intervention, whereas the lift model demonstrates how the Motorvator can considerably simplify a model requiring user intervention. I have seen a lift model wth a very complex circuit involving numerous relays to do the same job.
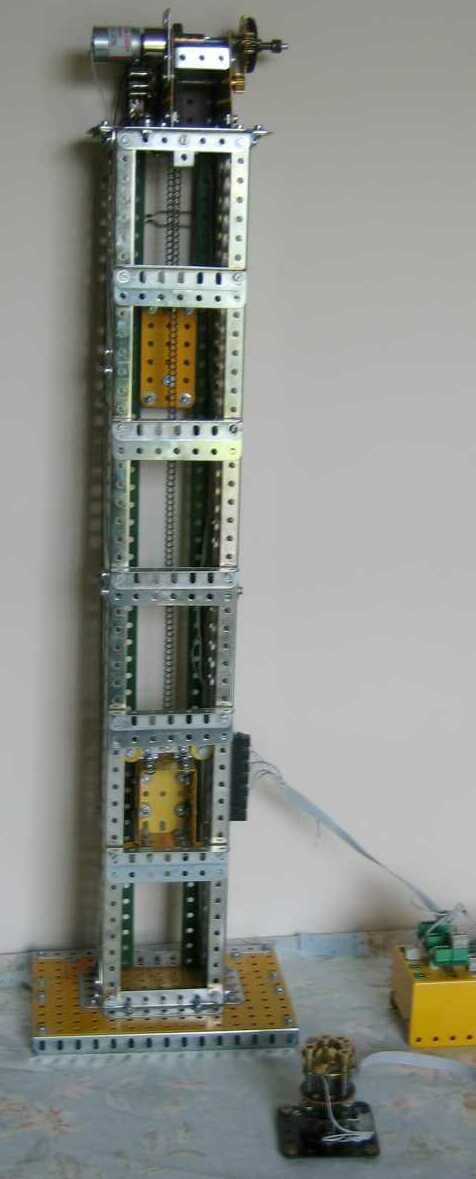
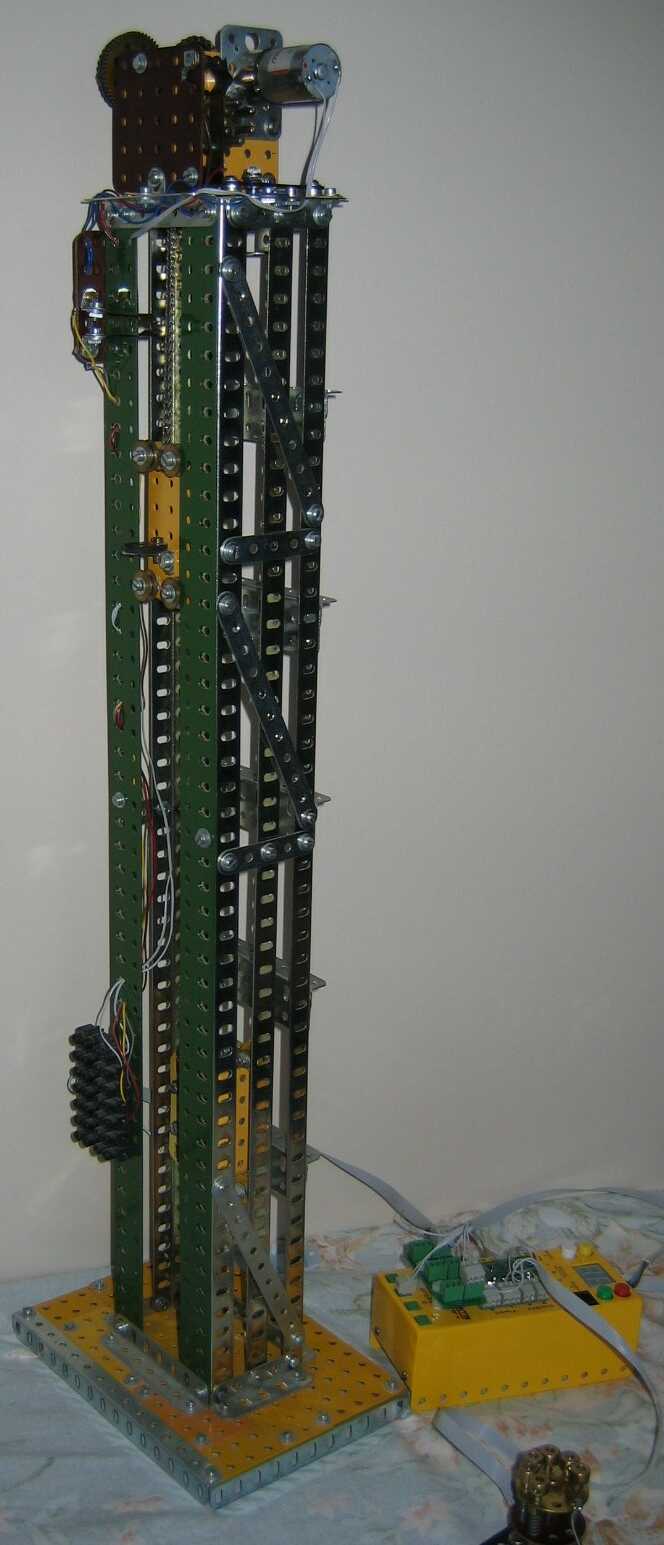
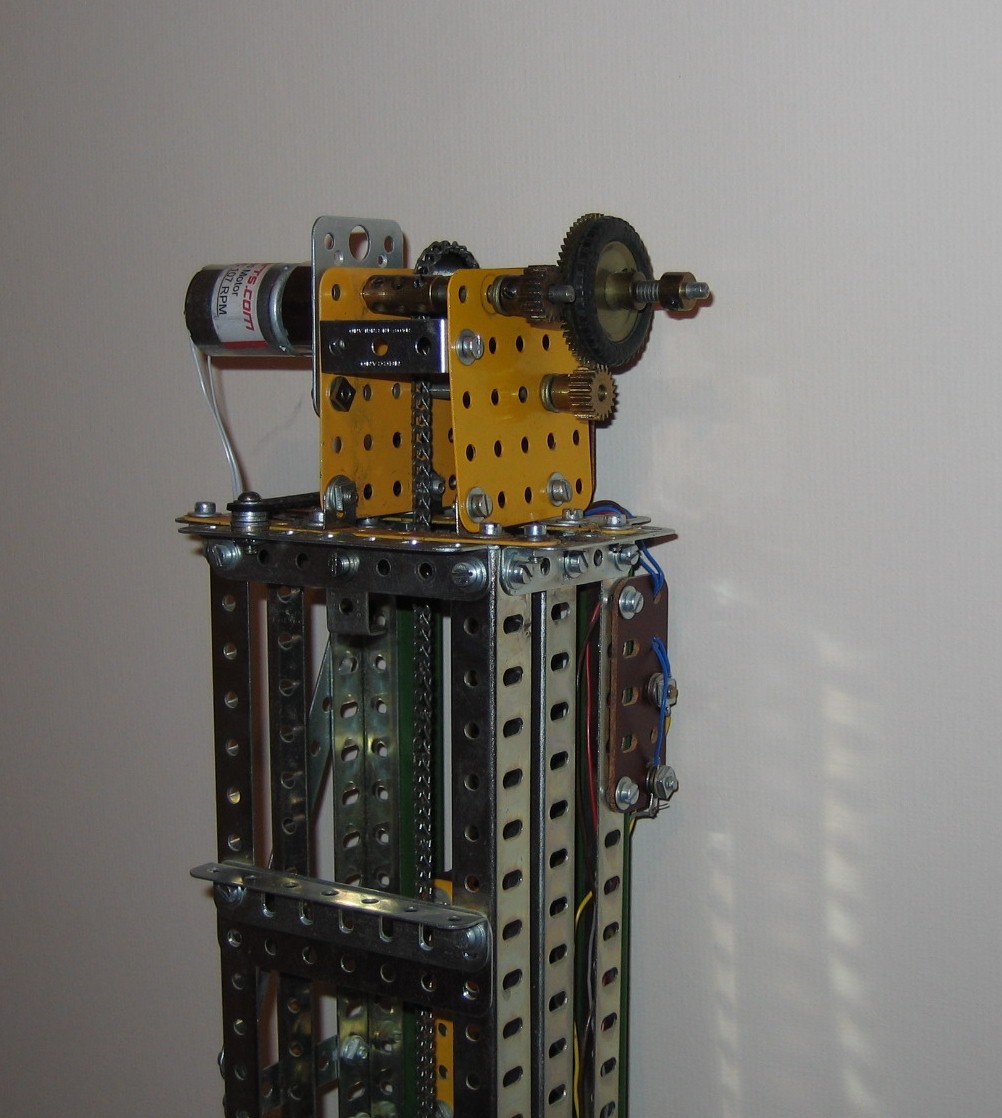
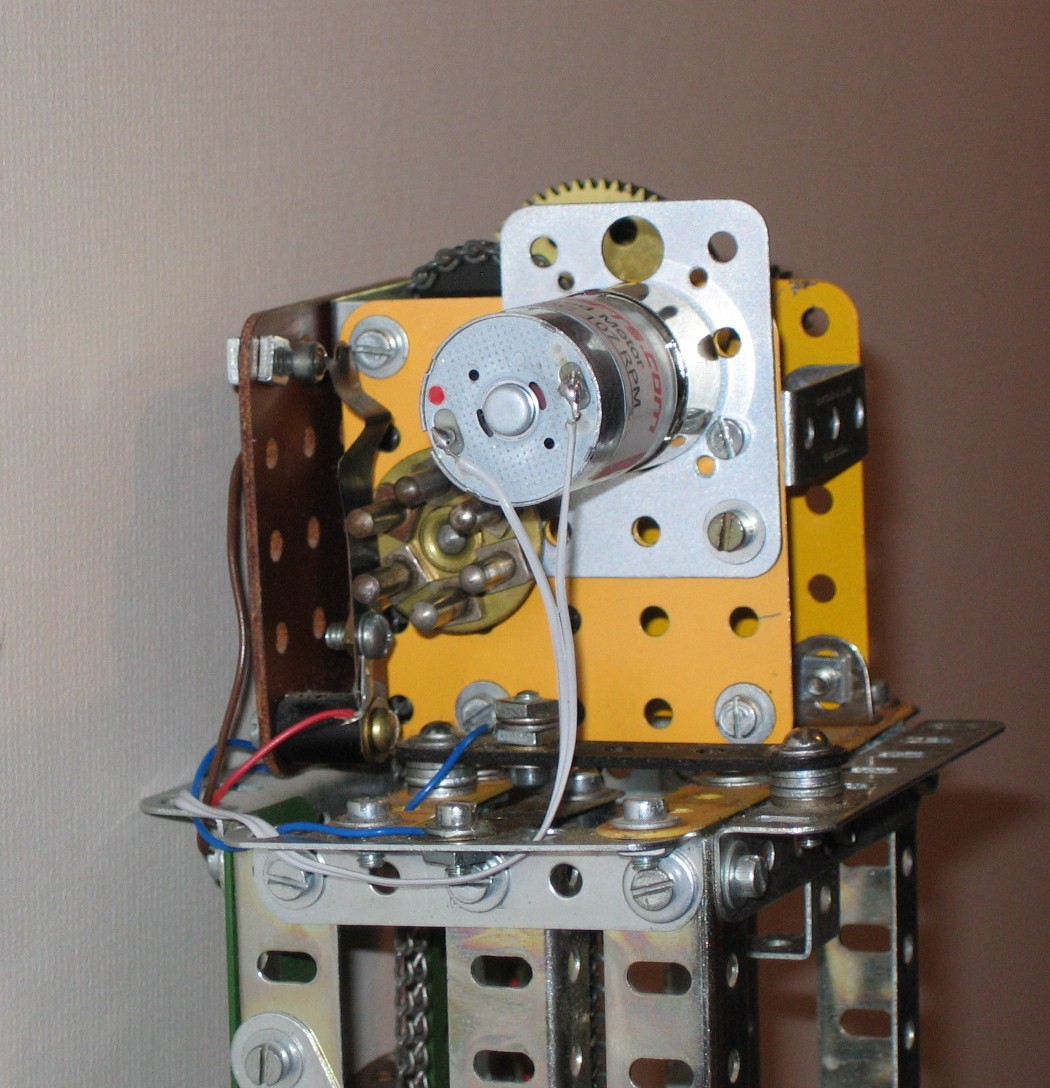
The model is accurate at floor levels to about +- 3mm max.and more usually to +- 2mm. It might be possible to improve on this with further tweaking. The problems are motor overrun , positioning of the rotation counter when it stops and possibly the rotation counter missing a pulse ( I don't think this happens although it might). I have used a Meccanisms 107rpm motor which seems just right for the job. Of course a stepper would give exact positioning and I might modify the model to test this.
On the model, selecting ground or 5th floor will re register the position and can always be selected if a sgnificant position error is noticed although in practice I have rarely found an error greater than 4mm. Andrew has suggested that greater accuracy might be obtained by slowing the motor to reduce overun as the lift approaches floor level and I am experimenting with this.
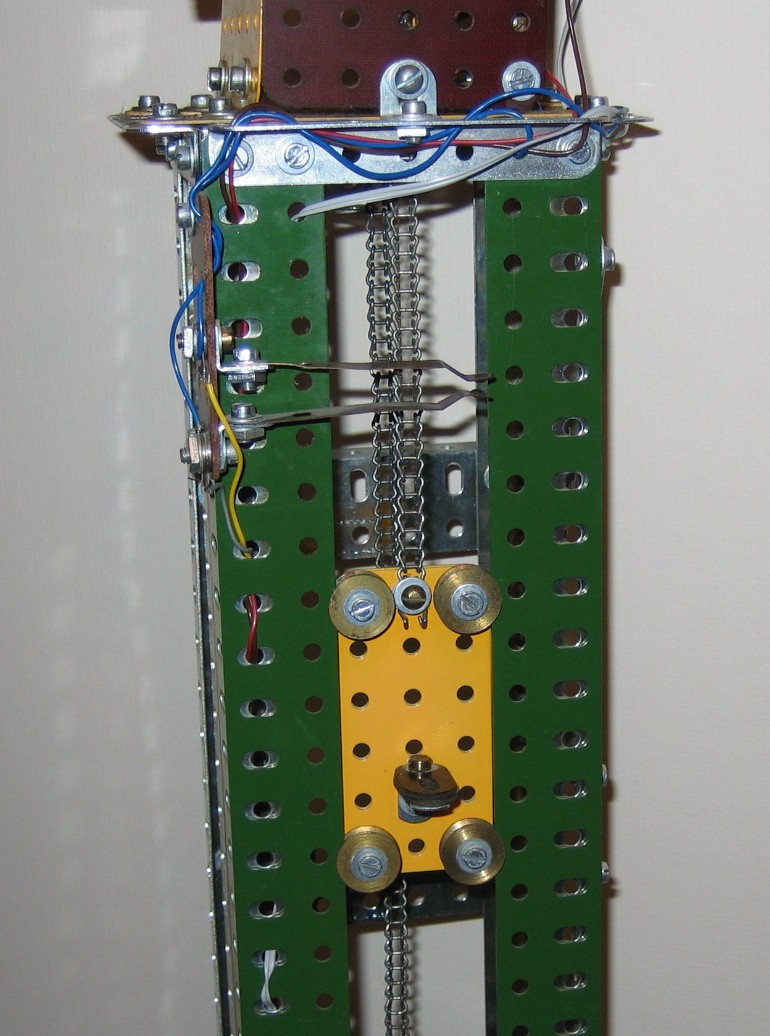
Note that the limit switch in the photo IS the ground floor switch: it is triggered by the counterweight which is of course at the top when the lift car is at the bottom!
The Consul of lift call buttons is made of standard Meccano and Electrikit parts. the connection to the motorvator is to OnOff 1(two wires), OnOff 2 to 4 (+ive pin only), Timed 1 (centre pin only) and timed 2 (centre pin only). The ground is connected at the consul to all 6 inputs.

The inputs from the model are the rotation counter connected by two wires to Timed 4 (ground and centre signal pins), the limit switch for ground and fifth (two switches one connection to timed 3) and the motor connected to motor port B.
I have used the Director socket extension board but I imagine that the Analogue inputs on the Motorvator could be used instead with a small change in the program.
As you can see the program consists of a simple loop which tests for a button press for each floor in turn.
The Consul could be considered as a model specific "Director" and the idea could be extended to much more complex models.
Here is the code for the MotorVator
Begin Program
Declare Byte Counter=0
Declare Byte Totalcount=0
Declare Byte Stoptb=0
Declare Byte Ground=0
Declare Byte First=0
Declare Byte Second=0
Declare Byte Third=0
Declare Byte Fourth=0
declare Byte Fifth=0
Declare Byte DiffCount=0
Declare Byte StartCount=0
Declare Byte Finalcount=0
Declare Byte AtFloor=0
Declare Byte Speed=50
Disable Events
SetEvent 19,rotationcount
Enable Events
Call Initialise() ;This initialises the program and takes the lift to the Ground floor
Loop
ground=readOnOff(1)
if ground=1 then
AtFloor=0 ;This variable prevents any action if the lift is already at the floor for the button pressed
Call Initialise() ;also reregisters position
end if
first=readOnOff(2)
if AtFloor<>1 then
if first=1 then
call GoToFirst()
Atfloor=1
end if
end if
second=readOnOff(3)
if second=1 then
if AtFloor<>2 then
Call GoToSecond()
AtFloor=2
end if
end if
third=readOnOff(4)
if third=1 then
if AtFloor<>3 then
Call GoToThird()
AtFloor=3
end if
end if
fourth=readtimedstate(1)
if fourth=1 then
if AtFloor<>4 then
Call GoToFourth()
AtFloor=4
end if
end if
fifth=Readtimedstate(2)
if fifth=1 then
Call GoToFifth() ;Also reregisters position
AtFloor=5
end if
End Loop
End Program
Declare EventHandler RotationCount()
counter=ReadTimedState(4)
If counter=1 then
TotalCount=TotalCount+1
End If
DisplayNumber Totalcount
End EventHandler
Declare Function Initialise()
SetMotor 2,backward,speed
Do
stoptb=readtimedstate(3)
Until stoptb=1
Do
SetMotor 2,backward,speed
counter=ReadTimedState(4)
Until counter=0
Stopmotors
totalcount=0
End Function
Declare Function
GoToFifth()
SetMotor 2,Forward,speed
Do
Stoptb=readtimedstate(3)
Until Stoptb=1
;displayNumber totalcount
Do
counter=1 ; An attempt to move the counter to a standard position
displayNumber counter
SetMotor 2,forward,speed
counter=ReadTimedState(4)
displayNumber counter
Until counter=0
Stopmotors
totalcount=120
stoptb=0
End Function
Declare Function
GoToFirst()
If TotalCount<=24 then
Do
SetMotor 2, forward,speed
Until totalcount=26
totalcount=24
End If
If TotalCount>24 then
StartCount=totalcount
Do
SetMotor 2, backward,speed
DiffCount=Startcount-totalcount ;calculates the position relative to the last count
finalcount=Startcount+DiffCount
Until finalcount=30
TotalCount=24
End If
StopMotors
End
Function
Declare Function
GoToSecond()
If TotalCount<=48 then
Do
SetMotor 2, forward,speed
Until totalcount=48
End If
If TotalCount>48 then
StartCount=totalcount
Do
SetMotor 2, backward,speed
DiffCount=Startcount-totalcount
finalcount=Startcount+DiffCount
Until finalcount=53 ;In an ideal world this would be 48 but changes were made to allow for motor overun.
TotalCount=48
End If
StopMotors
End Function
Declare Function
GoToThird()
If TotalCount<=72 then
Do
SetMotor 2, forward,speed
Until totalcount=72
End If
If TotalCount>72 then
StartCount=totalcount
Do
SetMotor 2, backward,speed
DiffCount=Startcount-totalcount
finalcount=Startcount+DiffCount
Until finalcount=76 ;see note above
Totalcount=72
End If
StopMotors
End Function
Declare Function
GoToFourth()
If TotalCount<=96 then
Do
SetMotor 2, forward,speed
Until totalcount=96
End If
If TotalCount>96 then
StartCount=totalcount
Do
SetMotor 2, backward,speed
DiffCount=Startcount-totalcount
finalcount=Startcount+DiffCount
DisplayNumber finalcount
Until finalcount=101
End If
TotalCount=96
StopMotors
End Function