- Home
- Products
- Articles
- 4 Axis Robot Arm
- A Stepper Motor Driven Ferris Wheel (Version 3 Compiler required)
- An Update on Keith Cameron's Lift
- Automatic Tram Layout
- Bug in Increment Word Instruction
- Compiler Version Releases
- Industrial Arc Welding Robot
- MotorVating the Speed Play Robot
- Reproducing the Electronic Set Models
- Sensor Expansion Port Pinout Diagram
- Sheet 1 - Hardware from NZ 240 volt wall socket to...
- Sheet 3 Meccano Car model controlled by the MotorVator and Director.
- Sheet 2 - Hardware from Motor(s) to MotorVator®.
- User Input Options
- Version 3 Manual Released
- 16/32 Bit Maths Routines
- Build Your Own Photo Sensor
- Controlling Stepper Motors
- Magnetic reed switch as a non contact sensor
- MeccCompiler III Tutorial
- More Inputs and/or Motors: Port Replication
- More Inputs: the Sensor Expansion Port
- Square Root Function
- Tutorial: Rev Counter
- Use of the opto switch or opto interrupter as a ro...
- FAQ
More Inputs: the Sensor Expansion Port
In addition to the 2 x Timed Inputs and 2 x Analogue Inputs on the basic configuration, there are an additional
2 x Timed Inputs
4 x Analogue Inputs
accessible via the HD15 (Director) socket on the MotorVator.
Looking down at the socket, the connections are as follows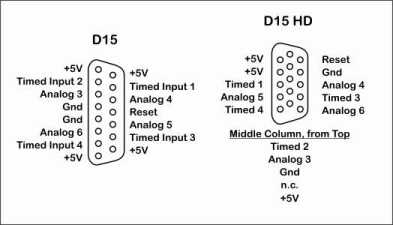
To access these signals.
Option 1 - get a standard 15 way PC Video cable, cut it in half and 'buzz through' to find the signals.
Option 2 - buy a Port Expander cable from www.meccparts.com
Option 3 - use one of Meccanisms Sensor Expansions Boards.
The Sensor Expansion Board fits into the Director Socket on the MotorVator and "Brings Out" the extra 6 input ports.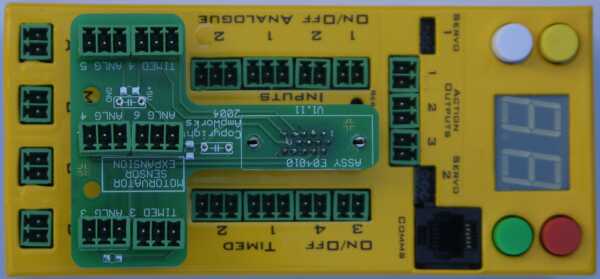
There are two models available.
On the Left, the Basic model gives Solder Points for the 6 ports.
On the Right, the Deluxe model presents all 6 ports using Motorvator standard sockets.
Both can be purchased from www.meccparts.com