- Home
- Products
- Articles
- 4 Axis Robot Arm
- A Stepper Motor Driven Ferris Wheel (Version 3 Compiler required)
- An Update on Keith Cameron's Lift
- Automatic Tram Layout
- Bug in Increment Word Instruction
- Compiler Version Releases
- Industrial Arc Welding Robot
- MotorVating the Speed Play Robot
- Reproducing the Electronic Set Models
- Sensor Expansion Port Pinout Diagram
- Sheet 1 - Hardware from NZ 240 volt wall socket to...
- Sheet 3 Meccano Car model controlled by the MotorVator and Director.
- Sheet 2 - Hardware from Motor(s) to MotorVator®.
- User Input Options
- Version 3 Manual Released
- 16/32 Bit Maths Routines
- Build Your Own Photo Sensor
- Controlling Stepper Motors
- Magnetic reed switch as a non contact sensor
- MeccCompiler III Tutorial
- More Inputs and/or Motors: Port Replication
- More Inputs: the Sensor Expansion Port
- Square Root Function
- Tutorial: Rev Counter
- Use of the opto switch or opto interrupter as a ro...
- FAQ
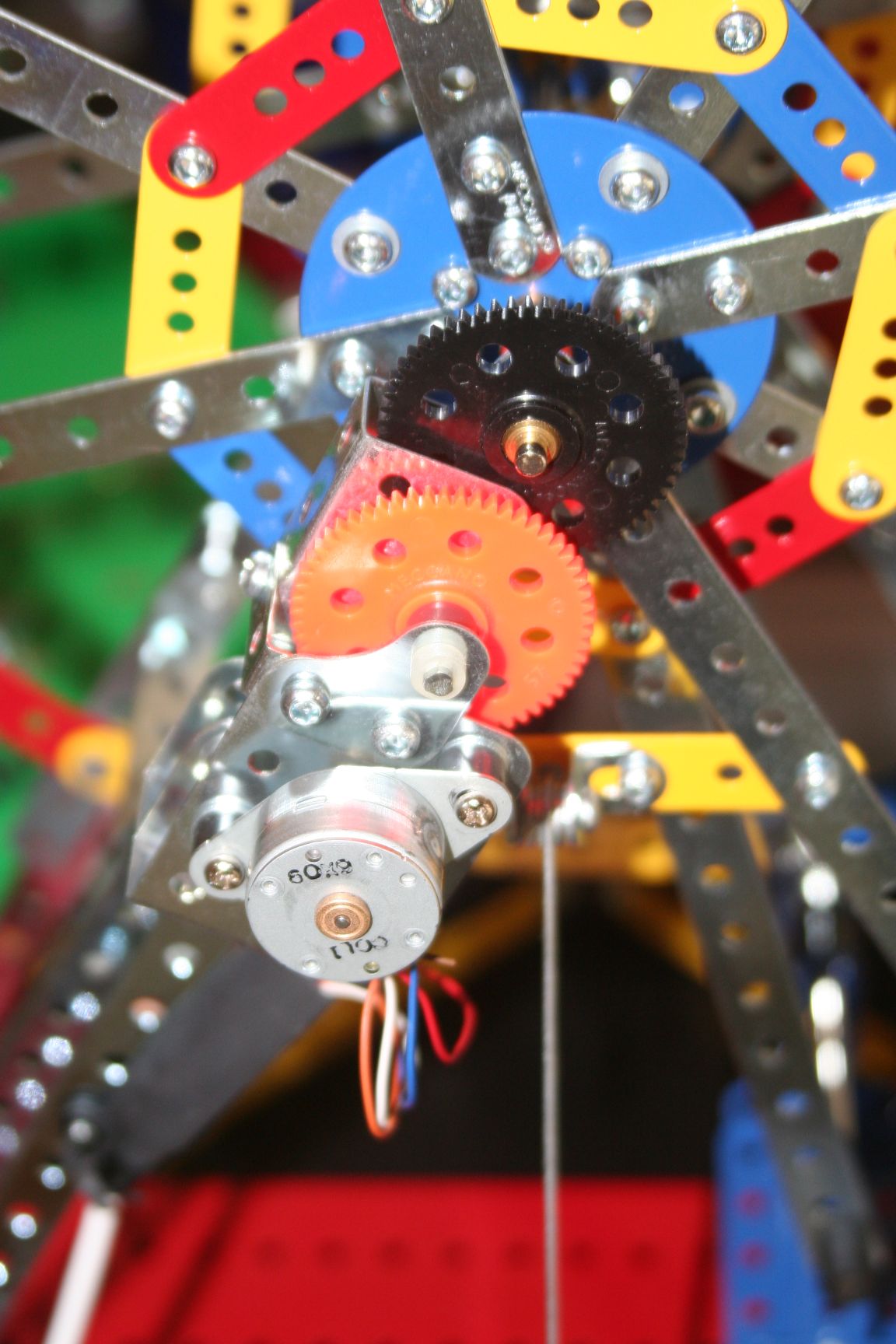
A Stepper Motor Driven Ferris Wheel (Version 3 Compiler required)
Here's a simple and effective modification to the Meccano 8257 Ferris Wheel Kit.
Build up the basic model, but invert the main shaft hanging triangular plates so that they are above the apex of the supporting 25H strips.
Make up a 9:1 reduction gearing as shown, to connect the small Meccparts Stepper motor to the main shaft.
Then use the following code to make the wheel move around to each car in turn to load on the patrons, then run a couple of times around before starting the loading/unloading again:
;===========================================
;
; Ferris Wheel Automator, using Stepper Motor
;
; Using 48 step per rev stepper, geared 1:9
; to the ferris wheel.
; So a full circle is 48 x 9 = 432 steps
; Each car position is 432/8 = 54 steps
;
;===========================================
Declare
Boolean Stepped
Declare Byte car
Begin Program
; the StepAgain event fires whenever a Stepsequence finishes
; use this to "wait" for the end of the stepping
SetEvent Stepper1Event
,stepagain
Enable Events
Loop
ConfigStepper 060
,100,2
Stepped
= False
Wait 500
; position each car at the loading platform
car = 1
Do
DisplayNumber car
Stepped = False
SetStepper 1,"F",54
Do
Until stepped = True
Increment car
Wait 500
Until car
= 9
; now do some complete circles
Stepped = False
DisplayChars
"O","-"
Wait 100
ConfigStepper 030,100,2 ; go faster
SetStepper 1
,"F",864 ; 54 x 8 x 2
Do
Until stepped = True
End Loop
End Program
;==========================================
Declare EventHandler stepagain()
Stepped = True
End EventHandler
;==========================================